
Computer Vision Engineer
Entrust your project or task to the expert who will do it at the highest level and on time

About me

I take part in programming and designing computer vision systems.
I already have the following projects in my piggy bank:
-
advanced driver-assistance systems (LDWS, LCA, ACC, TLR, TSR, etc);
-
CARLA simulation for autonomous vehicle functions development and testing;
-
Auto-deploy of services into the ego by using Ansible;
-
Implementation of circular bird-eye view for mobile robots;
-
3D - to - 2D projection and vice versa for the objects;
-
Objects and lanes tracking for autonomous ego;
-
sensor data fusion, sensor intrinsics-and-extrinsics calibration;
-
UAV lane tracking;
-
UAV landing pad detection;
-
cup detection for barista manipulator;
-
ball detection and tracking for ping-pong manipulator;
-
car wash monitoring;
-
unmanned special purpose vehicles;
-
etc.

Services I Provide
I offer the following services. If you have a different need, feel free to reach out to me.

Programming
Python, and C++.
Various tasks that need to be programmed.

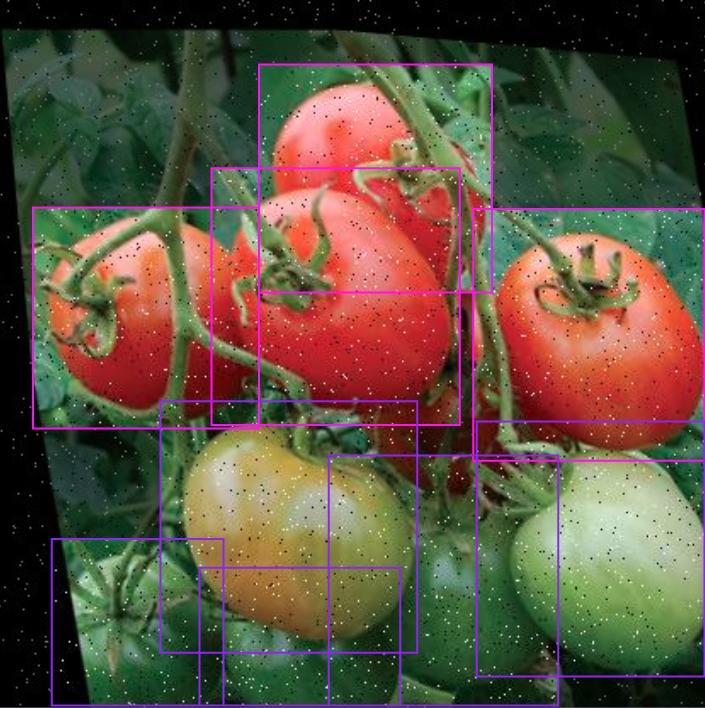
Computer Vision
The development of computer vision systems.
- OpenCV
- Pytorch, TensorFlow, tensorRT
- Nets Deployment, optimization
- sensors selection, sensors calibration
- Object Detection, Segmantion, Tracking
- Multi-task neural networks
- classical approaches, etc.
Check Some of My Recent Work

My Expertises
Clicking on “Education” button you can see the universities, some courses I graduated.
Clicking on “Experiences” button you can find the list of jobs and big projects, competitions I was involved in.
C++ Developer Specialization
Completed a year-long course in advanced C++ programming
Sequence Models
Completed 5th course in Deep Learning specialization from DeepLearning.AI.
Convolutional Neural Networks
Completed 4th course in Deep Learning specialization from DeepLearning.AI.
Structuring Machine Learning Projects
Completed 3rd course in Deep Learning specialization from DeepLearning.AI.
Improving Deep Neural Networks: Hyperparameter Tuning, Regularization and Optimization
Completed 2nd course in Deep Learning specialization from DeepLearning.AI.
Neural Networks and Deep Learning
Completed the 1st course from DeepLearning.AI about neural networks.
Master in Computer Science
Graduated Innopolis University. Thesis project was dedicated to the dynamic walking of quadruped robot
Achievements:
{kind=link}
{kind=link}
Bachelor in Mechatronics and Robotics
Graduated Bauman Moscow State Technical University. Thesis project was dedicated to the development and control of a vertical walking three-link robot
Achievements:
- The best student of the robotics department (2018)
TechTrans
Computer Vision Engineer / Team Lead
- Prototype of the system for tracking violations on rails
- Railroad Simulator, which allowed to save resources on debugging algorithms and providing experiments
- Sensors selection
- Models training, datasets aggregation and augmentation with use of ClearML
- Objects tracking, detection
- Project management, problem solving, leading a team of 3 specialists
- Disparity and depth estimation
Autonomous Technologies Laboratory
Computer Vision Engineer
- Developed LED computer vision system for UAV day-night landing site position and orientation
- Contributed to the UAV landing zone detection system for the task of safe autonomous landing
- Developed a LDWS system (attention). Was responsible for neural network output processing and deployment, software implementation of the algorithm, and camera operation.
- (Auto)collecting data from sensors, gathering images for the project, etc.
- Sensor calibration, getting internal and external parameters
- Realization of 360 * view from cameras (BEV)
- Sensor fusion
- Sensors selection for different projects
- neural networks deployment
- Model output post-processing
Achievements:
- 2 RSCI papers, 2 IEEE paper and 1 patent
Aerobot 2020 Competition
Computer Vision
“Racoon Lab” team.
- Developed ROS node so drone could follow the line on the ground
- Designed ROS node so drone could alocate the landing site and remember it in order to return back after completing the mission
Achievements:
- Winning a competition
Innopolis University Robotics Lab, Innopolis, Russia
Intern
-
Developed computer vision for UR10 manipulator in order to get ping-pong ball position using RealSense D435i w.r.t. the robot base.
JBL Robotics, Moscow, Russia
Engineering Assistant
- Developed ROS nodes to control the barista robot
- Designed the stands for cups and the gripper for the robot

Why get in touch?
Below you will see a basic set of skills that I have as a specialist
What Do People Say About Me?

Recent Article
View my last posts in blog

Python: Map and Filter functions
