
Инженер по компьютерному зрению
Доверьте свой проект или задачу специалисту, который сделает это на высшем уровне и в срок.

Обо мне

Программирую и проектирую системы компьютерного зрения.
В моей копилке уже имеются следующие проекты:
-
слежение БПЛА за полосой движения;
-
обнаружение посадочной площадки БПЛА;
-
детектирование стакана для манипулятора-бариста;
-
детектирование мяча и слежение за ним для пинг-понг манипулятора;
-
мониторинг автомойки;
-
управление четырехногим роботом (собака);
-
системы помощи водителю (LDWS…);
-
беспилотные транспортные средства специального назначения;
-
слияние данных с сенсоров, калибровка сенсоров;
-
Реализация кругового bird-eye view для мобильных роботов;
-
слежение за объектами и так далее…

Услуги, Которые Я Предлагаю
Я предлагаю следующие услуги. Если у вас есть другие потребности, не стесняйтесь также обращаться ко мне.

Программирование
Python, C и C++.
Различные задачи, проекты, требующие программирования.

Компьютерное Зрение
Разработка систем компьютерного зрения.
- OpenCV
- Pytorch, TensorFlow
- Развертывание и оптимизация нейронок
- Подбор и калибровка сенсоров
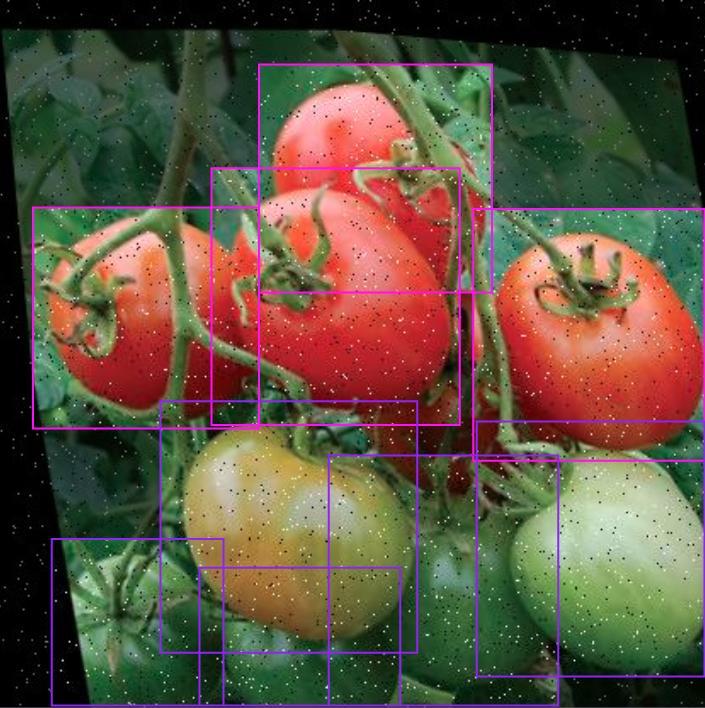
- Обнаружение, сегментация и отслеживание объектов
- классические подходы и др.
Посмотрите Мои Недавние Проекты

Бэкграунд
Нажав на кнопку «Образование», Вы увидите университеты и курсы, которые я окончил.
Нажав на кнопку «Опыт», Вы найдете список крупных проектов, соревнований, в которых я принимал участие.
C++ Developer Specialization
Прохожу курс компании SkillBox длительностью в 1 год для получения глубоких навыков языка программирования C++
{kind=link}
Последовательные Модели
Закончил 5ый курс в специализации “Глубокое обучение” от DeepLearning.AI.
Сверточные Нейронные Сети
Закончил 4ый курс в специализации “Глубокое обучение” от DeepLearning.AI.
Структура Проектов Машинного Обучения
Закончил 3ий курс в специализации “Глубокое обучение” от DeepLearning.AI.
Улучшение Нейронных Сетей: Регулировка гиперпараметров, регуляризация и оптимизация
Закончил 2ой курс в специализации “Глубокое обучение” от DeepLearning.AI.
Нейронные сети и Глубокое Обучение
Закончил 1ый курс в специализации “Глубокое обучение” от DeepLearning.AI.
Магистр Компьютерных Наук
Окончил Университет Иннополис. Дипломная работа была посвящена динамической ходьбе четвероногого робота.
Достижения:
{kind=link}
{kind=link}
Бакалавр Мехатроники и Робототехники
Окончил МГТУ им. Н. Э. Баумана. Дипломный проект был посвящен разработке и управлению трехзвенным вертикально шагающим роботом.
Достижение:
- Лучший студент кафедры робототехники (2018)
ТехТранс
Computer Vision Engineer / Team Lead
- Прототип системы отслеживания нарушений на рельсах
- Железнодорожный симулятор, который позволил сэкономить ресурсы на отладке алгоритмов и проведении экспериментов
- Выбор датчиков
- Обучение моделей, агрегация и пополнение наборов данных с использованием ClearML
- Отслеживание объектов, обнаружение
- Ведение проектов, предложение путей решений, руководство командой из 3х специалистов
- Оценка диспаратности и глубины
Лаборатория Беспилотных Технологий, г. Иннополис, Россия
Специалист по Компьютерному Зрению
- Разработал LED систему компьютерного зрения для определения положения и ориентации посадочной площадки БПЛА “день-ночь”
- Сделал вклад в систему определения зоны приземления БПЛА для задачи безопасной автономной посадки
- Разработал систему помощи водителю при съезде с полосы для автобуса. Был ответственен за обработку выхода нейронной сети и ее развертывание, программную реализацию алгоритма, а также функционирование камеры.
- (Авто)сбор данных с датчиков, сборка образов для проекта и т. д.
- Калибровка сенсоров, получение внутренних и внешних параметров
- Реализация кругового обзора с камер (BEV)
- Слияние данных с сенсоров различных модальностей
- Подбор сенсоров для различных проектов
- Развертывание нейронных сетей
- постобработка выхода моделей
Достижение:
- 2 статьи РИНЦ и 2 IEEE, 1 патент
Соревнование “Аэробот 2020”, г. Таганрог, Россия
Специалист по Компьютерному Зрению
Участвовал в команде “Raccoon Lab” от Университета Иннополис.
- Разработал ROS ноду, чтобы дрон мог следовать по линии на земле
- Разработал ROS ноду, чтобы дрон мог определить место посадки и запомнить его, чтобы вернуться обратно после завершения миссии.
Достижение:
- Победа в соревновании
Лаборатория Робототехники Университета Иннополис, г. Иннополис, Россия
Стажер
- Разработал компьютерное зрение для манипулятора UR10, чтобы определять положение мяча для настольного тенниса с помощью RealSense D435i по отношению к базе робота.
- Отзыв и рекомендации от руководителя
JBL Robotics, г. Москва, Россия
Помощник Инженера
- Разработаны ноды ROS для управления роботом-бариста
- Разработал подставки для чашек и захват для робота.

Почему Именно Я?
Ниже Вы увидите основной набор навыков, которыми я обладаю как специалист
Что Обо Мне Говорят Клиенты?

Недавние статьи
Последние посты в Блоге

Python: Функции Map и Filter
